Na Marsie wylądował amerykański łazik Curiosity
- Osoby:
- 0
- Wydarzenia:
- 6Lista wydarzeń
- Groby:
- 0
- Miejsca:
- 0
- Cmentarze:
- 0
- Data wydarzenia:
- 06.08.2012
Mars Science Laboratory, MSL (oficjalna nazwa łazika: Curiosity) – bezzałogowa misja kosmiczna, której celem jest zbadanie przeszłego i obecnego środowiska Marsa poprzez szereg badań, wykonanych za pomocą łazika Curiosity, wewnątrz krateru Gale. Misja rozpoczęła się 26 listopada 2011 roku wystrzeleniem sondy kosmicznej przy użyciu rakiety Atlas V (konfiguracja 541) z Cape Canaveral Air Force Station. Lądowanie na Marsie nastąpiło 6 sierpnia 2012. Główna misja łazika zaplanowana jest na 1 rok marsjański (tj. 687 ziemskich dni), z możliwością jej przedłużenia.
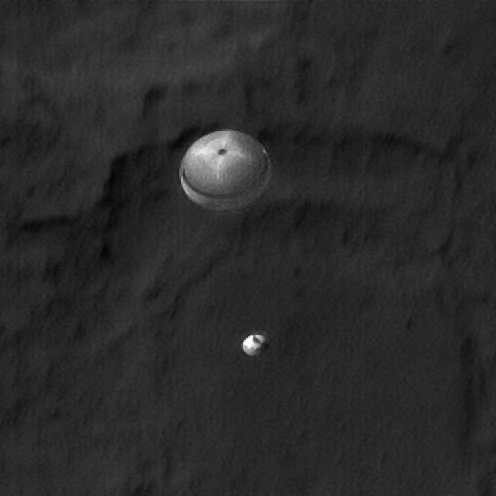
Gdy statek przekroczył granicę atmosfery Marsa, rozpoczęła się ostatnia faza lotu – wejście i lądowanie (EDL – ang. Entry, Descent and Landing). Cała faza, choć najkrótsza (trwała kilkanaście minut), była krytyczna dla powodzenia całej misji. Na 10 minut przed wejściem do atmosfery statek odłączył się od modułu przelotowego (który wykonywał korekty trajektorii do Marsa). MSL wszedł w atmosferę na wysokości ok. 130 km nad powierzchnią. Po odłączeniu uruchomiły się przewidziane na tę fazę instrumenty pomiarowe. Następnie silniczki kapsuły ustawiły statek w stałym położeniu umożliwiającym bezpieczne wejście w atmosferę. Potem zostały odrzucone ciężary stabilizujące obrót statku. Trajektoria wejścia była cały czas utrzymywana przez silniki manewrujące. Kolejnym etapem podejścia było otwarcie spadochronu, które nastąpiło na wysokości 11 km, gdy statek spadał z prędkością 400 m/s. Tuż po ich otwarciu odrzucona została osłona termiczna umieszczona na spodzie kapsuły. Zaraz po tym zostały uruchomione urządzenia radarowe i termiczne kontrolujące wysokość statku. Następnie dolna część kapsuły (tj. lądownik) odłączyła się od modułu atmosferycznego ze spadochronem, po czym zostały uruchomione silniki lądujące lądownika, które od wysokości 1 km stopniowo redukowały prędkość i pozwalały na bezpieczne zniżanie. W trakcie zniżania na żurawiu (Sky Crane) został wypuszczony pojazd. Gdy dotknął gruntu (z prędkością 61 cm/s), kapsuła z żurawiem odłączyła się od łazika i odleciała na bezpieczną odległość. Po przyziemieniu komputer pokładowy przełączył się z trybu podejścia do lądowania (EDL mode) na tryb powierzchniowy (surface mode) i łazik przesłał na Ziemię (poprzez sondę Mars Odyssey) pierwsze zdjęcia.
Lądownik (Descent stage)Głównym zadaniem modułu lądującego (zwanego Sky Crane, ang. Podniebny Dźwig) było wyhamowanie statku silnikami w ostatnich minutach lotu i postawienie łazika za pomocą żurawia na powierzchni planety. Cel ten został osiągnięty dzięki ośmiu silnikom rozmieszczonym w parach na module lądującym. Gdy silniki ustaliły stały poziom zniżania, trzy wyciągane liny, do których przyczepiony był pojazd, zaczęły go stopniowo obniżać aż do miękkiego przyziemienia.
Curiosity RoverCuriosity jest lądownikiem sondy - zautomatyzowanym laboratorium naukowo-badawczym. Zawiera instrumenty naukowe do zaplanowanych zadań. Jest to sześciokołowy pojazd z zamontowanym oprzyrządowaniem badawczym, ramieniem robotycznym, systemami nawigacyjnymi i komunikacyjnymi, awioniką, oprogramowaniem i autonomicznym źródłem zasilania – radioizotopowym generatorem termoelektrycznym.
Wyposażenie
- MastCam − dwie dwu mega pikselowe kolorowe kamery wideo umieszczone po lewej (z obiektywem 34 mm) i po prawej stronie masztu (z obiektywem 100 mm) .
- ChemCam – urządzenie do zdalnej detekcji składu chemicznego, wykorzystujące laser i kamerę z lunetą do wykonywania zdjęć makro z odległości do 7,2 metra.
- Mars Hand Lens Imager (MAHLI) – kamera, jako jedno z pięciu instrumentów, umieszczona na rewolwerowej wieżyczce łazika Curiosity.
- APXS – spektrometr do badania składu chemicznego skał i gruntu.
- CheMin – instrument do analiz mineralogicznych metodą dyfrakcji i fluorescencji rentgenowskiej.
- Radiation Assessment Detector (RAD) – detektor szerokiego zakresu radiacji na powierzchni planety (do ustalenia zagrożeń przyszłej wyprawy załogowej).
- Mars Descent Imager (MARDI) – kamera do fotografowania i filmowania z wysoką rozdzielczością w fazie opadania i lądowania.
- Sample Analysis at Mars (SAM) – zintegrowany zespół przyrządów zawierający chromatograf gazowy, spektrometr mas i laserowy do analiz minerałów i atmosfery.
- Dynamic of Albedo Neutrons (DAN) – pulsujące źródło neutronów i detektor wody lub lodu na powierzchni Marsa.
- Rover Environmental Monitoring Station (REMS) – stacja meteorologiczna.
Powiązane wydarzenia






{kind=link}
Źródła: wikipedia.org
Brak miejsc przypisany
Żadne osoby przypisane